Matlab - Concentric tube robot design optimisation
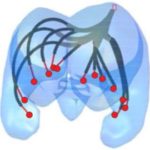
This repository contains matlab software pertaining to the design of concentric tube robots based on task and anatomical constraints. The software was developed as part of our 2015 IEEE Trans. Robotics publication, titled “Concentric tube robot optimization based on task and anatomical constraints”.
Github link: https://github.com/RViMLab/TRO2015-computational-robot-design
C. Bergeles, A. Gosline, N. V. Vasilyev, P. Codd, P. J. del Nido, and P. E. Dupont, “Concentric tube robot design and optimization based on task and anatomical constraints,” IEEE Trans. Robotics, vol. 31, no. 1, pp. 67–84, 2015.