C++ - Concentric tube robot - kinematics library
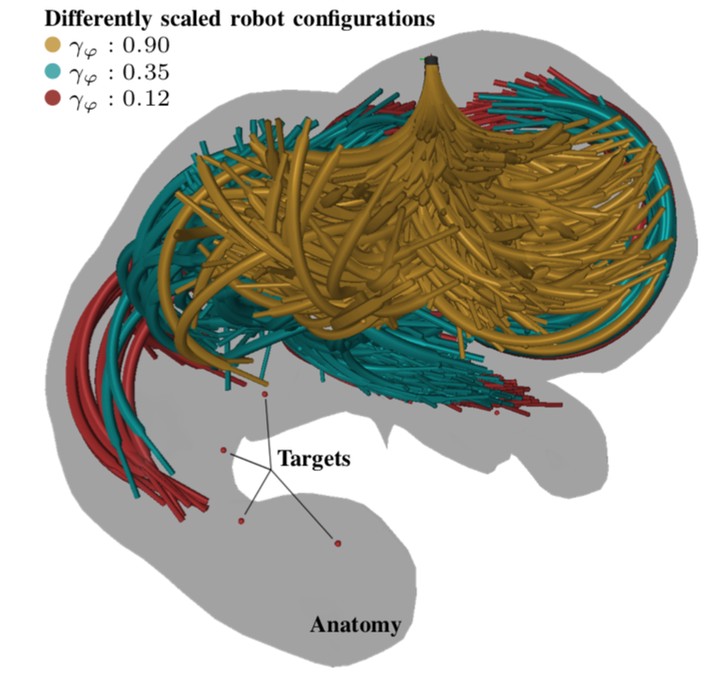
This repository contains C++ software pertaining to the calculation of the forward kinematics (torsional) of concentric tube robots in real-time. The software was developed as part of our 2017 IEEE Robotics and Automation Magazine publication, titled “Concentric tube robots: rapid, stable path-planning and guidance for surgical use”.
Github link: https://github.com/RViMLab/RAM2017-CTR-kinematics
K. Leibrandt, C. Bergeles, and G.-Z. Yang. “Concentric Tube Robots: Rapid, Stable Path-Planning and Guidance for Surgical Use.” IEEE Robotics & Automation Magazine 24.2 (2017): 42-53.