Mechanical Design of a Continuum Robot for Deep Orbital InterventionsLast updated on Oct 5, 2020Follow Photo by Zisos MitrosTo be updatedConcentric Tube RobotsAnestis Mablekos-AlexiouPhD StudentRelatedAutonomous Steering of Concentric Tube Robots via Nonlinear Model Predictive ControlAutonomous Steering of Concentric Tube Robots with Enhanced Force/Velocity ManipulabilityTowards Modelling Multi-Arm Robots-Eccentric Arrangement of Concentric Tubes
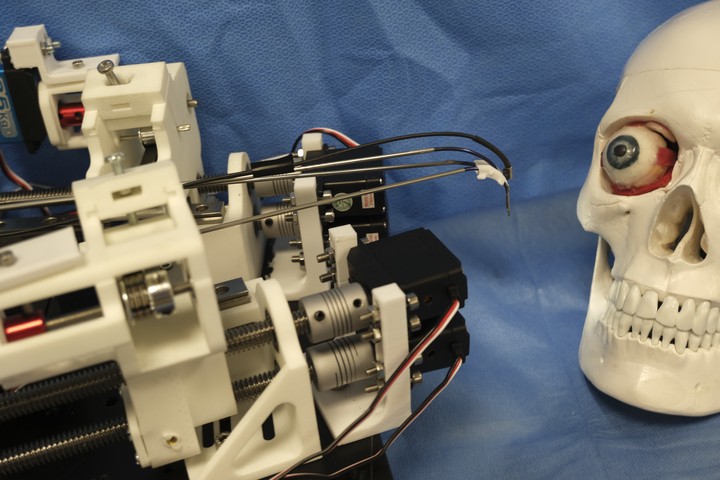 Photo by Zisos Mitros
Photo by Zisos Mitros
Photo by Zisos Mitros
Photo by Zisos Mitros