A co-manipulated robotic tool for vitreoretinal surgery Modeling and design considerations
 Rendering created by Anestis Mablekos
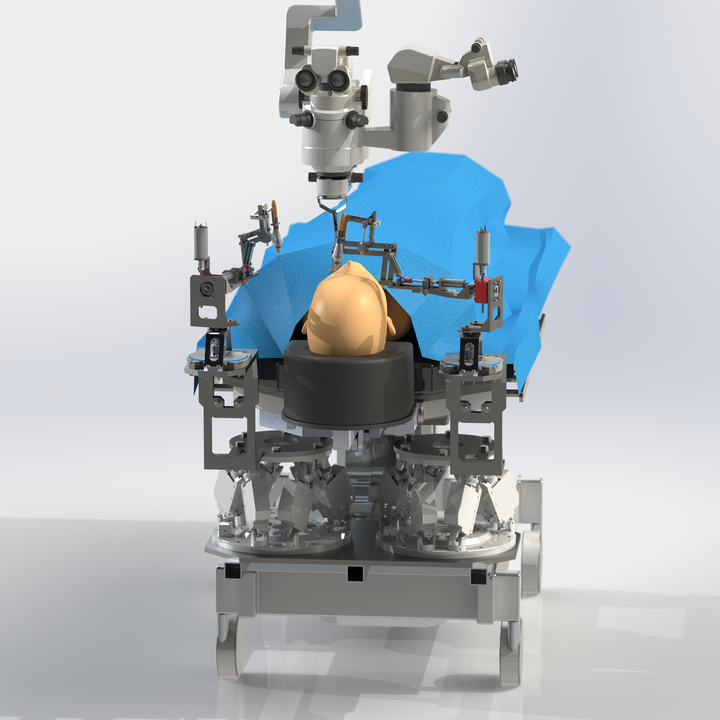
Rendering created by Anestis MablekosThe ultimate objective of the current research is to contribute to the transition from free-hand surgeries towards the robotically-assisted era by proposing new design ideas for the development of surgical robotic manipulators. Novel design protocols are created by evolving dynamic descriptions for components of the robot, such as the transmission systems, which are rarely thoroughly investigated. At the same time, modeling of the surgical environment in Computed Aided Design software (CAD) is conducted in an attempt to create a development basis that includes all the design constraints that stem from the surgical workstation itself. Hence, exploiting a dynamics as well as ergonomics directed approach, our ambition is to develop a robotic system with the precision of a machine, but with the convenience in installation and immediacy in manipulation of a hand-held tool, maximizing its chances for integration into the clinical sector.